Multi-armed bandit - optymistyczne wartości początkowe
Ten post jest częścią moich zmagań z książką "Reinforcement Learning: An Introduction" autorstwa Richarda S. Suttona i Andrew G. Barto. Pozostałe posty systematyzujące moją wiedzę i prezentujące napisany przeze mnie kod można znaleźć pod tagiem Sutton & Barto i w repozytorium dloranc/reinforcement-learning-an-introduction.
Wszystkie metody, które do tej pory opisałem zależne są od początkowych oszacowań wartości . Widoczne to jest zwłaszcza, gdy liczymy MAB z , czyli bez ekploracji cały czas wybierając najlepszą możliwą akcję (ramię). W statystyce nazywamy takie metody obciążonymi. Obciążenie znika dla metod z wynoszącym , gdy każda akcja zostanie wybrana co najmniej raz. Dla stałego , obciążenie nie znika, zmniejsza się jedynie wraz z upływem czasu (kolejnymi iteracjami algorytmu).
Aby pozbyć się obciążenia, możemy skorzystać z czegoś takiego jak optymistyczne wartości początkowe. W kodzie przykładów jakie do tej pory napisałem prawdziwe wartości każdej akcji (true value), pochodziły z rozkładu normalnego (średnia 0, wariancja 1) i ustalane były w konstruktorze:
self.true_reward = [np.random.randn() for _ in range(self.arms)]
Przy okazji przypominam, że pobieranie wartości dla danej akcji wygląda tak:
def get_reward(self, action):
return self.true_reward[action] + np.random.randn()
To tyle celem przypomnienia.
Możemy na początku działania zachęcić algorytm do eksploracji ustalając bardzo optymistyczne wartości początkowe. Ja wybrałem liczbę 5 i wygląda to tak:
self.action_count = np.ones(self.arms)
self.rewards = np.ones(self.arms) * 5
I to wszystko, więcej modyfikacji w kodzie nie trzeba. Co się dzieje jak odpalimy skrypt z takimi wartościami self.rewards? Zobaczmy to na przykładzie z epsilonem równym zero:
self.rewards:
[ 5. 5. 5. 5. 5. 5. 5. 5. 5. 5.]
reward: 1.87411213524
[ 3.43705607 5. 5. 5. 5. 5. 5.
1. 5. 5. ]
reward: 0.504446069392
[ 3.43705607 2.75222303 5. 5. 5. 5. 5.
1. 5. 5. ]
reward: 0.374953664141
[ 3.43705607 2.75222303 2.68747683 5. 5. 5. 5.
1. 5. 5. ]
reward: -3.66371477543
[ 3.43705607 2.75222303 2.68747683 0.66814261 5. 5. 5.
1. 5. 5. ]
reward: -1.59327852639
[ 3.43705607 2.75222303 2.68747683 0.66814261 1.70336074 5. 5.
1. 5. 5. ]
reward: -2.41539982786
[ 3.43705607 2.75222303 2.68747683 0.66814261 1.70336074 1.29230009
1. 5. 5. 5. ]
reward: -0.641184621377
[ 3.43705607 2.75222303 2.68747683 0.66814261 1.70336074 1.29230009
2.17940769 5. 5. 5. ]
reward: -1.53850026836
[ 3.43705607 2.75222303 2.68747683 0.66814261 1.70336074 1.29230009
2.17940769 1.73074987 5. 5. ]
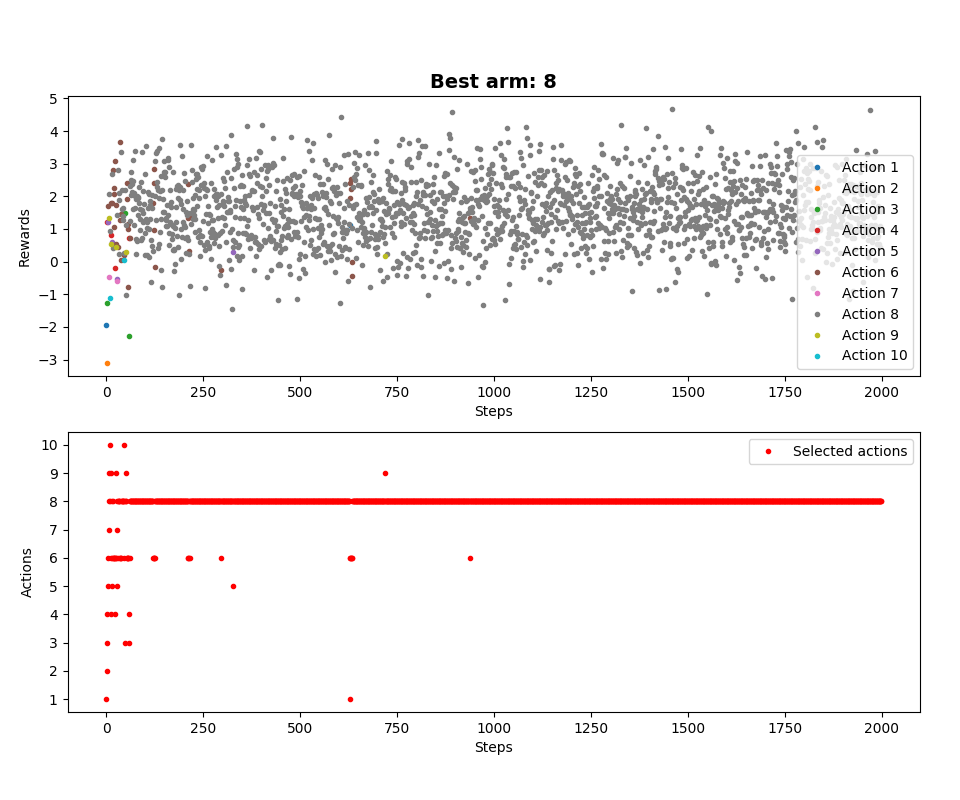
Otrzymane nagrody są niższe niż pięć, a do tego uśredniane, więc nawet dla epsilona wynoszącego zero następuje eksploracja i algorytm po kolei próbuje każdej akcji. Zobaczmy to jeszcze w formie graficznej (epsilon równy zero):
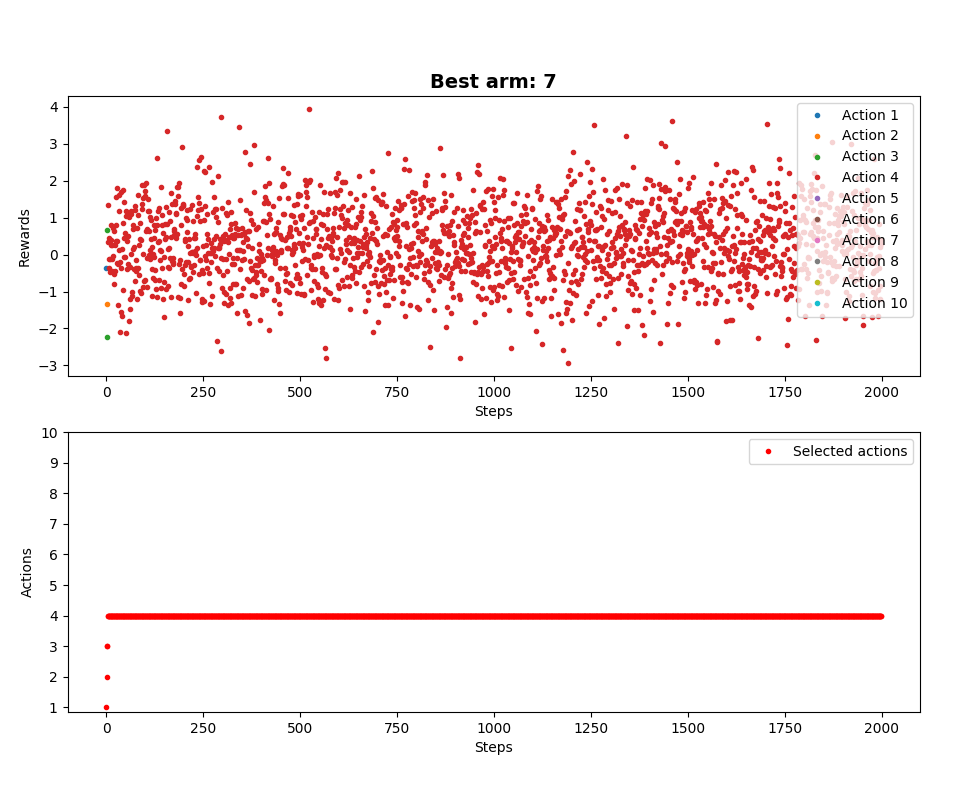
Dla porównania, bez naszej optymalizacji (epsilon również wynosi zero):
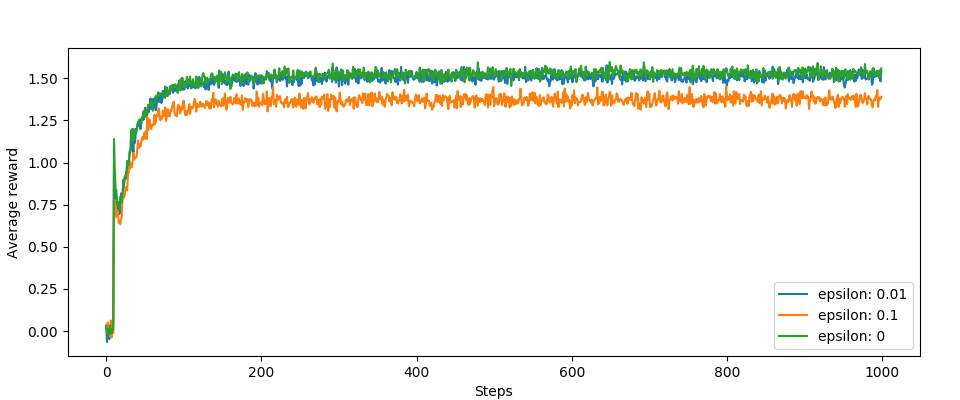
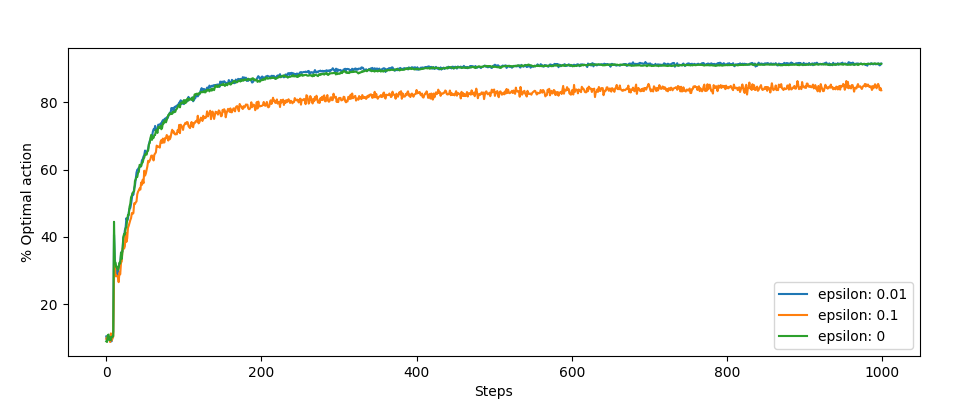
Inne wykresy, te skoki na początku są interesujące. Jest to efekt działania naszej optymalizacji:
Podsumowanie
Jak widać, jest to prosty, ale dość skuteczny sposób, by zachęcić MAB z e-greedy strategy, nawet gdy wybiera najlepsze akcje za każdym razem. Sposób ten jednak działa tylko na początku algorytmu, przy pierwszych kilkunastu iteracjach. W następnym poście zajmę się sposobem na ulepszenie eksploracji, tak zwanym Upper-Confidence-Bound (jak to przetłumaczyć?).